Previous Posts in this Series:
- “Creating a GPR”: Blog Series Introduction
- “Creating a GPR” Part 1: 5 Reasons Why We Started with Hands
- “Creating a GPR” Part 2: A Sense of Touch
In the early 1900s, imagining a world with billions of cars would have been hard. Today we take it for granted. But there was a world before cars. Now it’s hard to imagine a world without them.
Elon Musk and Vinod Khosla both claim that we will someday have billions of general-purpose robots working with and among us. This is also hard to imagine. But it may be necessary.
As birth rates plummet, and populations decline and age, the work that needs doing will increasingly have fewer people to do it. There won’t be enough of us to do the things that keep civilization working. We will need machines to do everything that needs to be done.
Billions of general-purpose robots doing all the things will change the world in a more profound way than cars did. We are at the stage now when early versions of these machines are being designed and put to work. There are many organizations looking to build this future with differing perspectives on what is important to do and in what order.
This post is about how we thought about the design of Phoenix, Sanctuary’s most recent general-purpose robot.
What is a General-Purpose Robot?
At Sanctuary, general-purpose means a robot physically capable of doing most of the world’s work. A general-purpose robot must be able to be anything from an accountant to a zoologist. We don’t want to make design choices that limit what work these robots can physically do.
This requirement places stringent constraints on the physical form of the machine. The ideal physical form for doing the sort of work we want and need done is human-like. Our world is, and always will be, designed for people. The objects and environments in our world are designed to be lived in and acted upon by us. A machine that is not human-like will not be able to do many of the tasks we care about.
Damion Shelton, CEO of Agility, puts it this way: "I have a Roomba, but, it doesn’t matter how good your L.L.M. is, there is no piece of code that is going to result in it driving to my front hall and putting my HelloFresh box in the recycling bin." (L.L.M. stands for Large Language Model, which includes as an example OpenAI’s GPT-4). The point being that Roombas are not physically capable of performing that task (or anything other than the single specific thing they are designed for)... and no software can change that.
What Do People Physically Do When We Work?

The US Department of Labor has answered this question, in the form of the O*NET system. O*NET characterizes all the things that are necessary, physically and cognitively, to deliver work across more than 1,000 occupations in the US economy.
This system contains data sufficient to rank the physical and cognitive attributes people bring to work in order of importance. Here we’ll just deal with the physical side, as the cognitive side is a software thing, and in this post, we’re just focusing on robot hardware and design.
The top three most important physical requirements to do work according to O*NET, in order of importance, are:
- Human-like senses. The robot must be able to sense the world the same way we do.
- Highly capable hands. Dexterous in-hand manipulation of things is required for more than 98% of all occupations.
- Mobility. Being able to move around from place to place (flat floors, steps, stairs, ladders), get in and out of things (cars, seats, rooms), and the like.
Doing work requires our robot to be able to sense the world around it the same way we do. While there are jobs that require smell and taste, most work can be done with a robot with just four human-like senses: vision, hearing, proprioception (knowledge of where its body is in the world), and touch. Touch is a very important sense, on par with vision, because the human-like use of hands requires touch.
Previous posts of the series have already… touched… on the significance of hands, but it’s worth reiterating here. While there are many economically important tasks that do not require the capabilities of the human hand, these number less than 2% of all tasks. Can you build a vibrant business building robots that only address these 2%? Yes, of course — 2% of the global economy is a very big number! But that’s not our goal here. We want to think about what general-purpose robots should look like. It is clear that in order to do nearly any job, you need robotic hands that are functionally very similar to the human hand.
While it is possible to build grippers of increasing capability, say with three or four fingers, or lacking the shape of the human hand, these types of design decisions dramatically degrade generality. To be truly general for work, the hand must be a mimic of the human hand, with four fingers and an opposable thumb, with 20+ degrees of freedom per hand. Nearly everything in the world of work, from doorknobs to keyboards to consumer products, is built to conform to the specific details of how our hands work.
In addition to the need for hands, work requires that the hands be able to do a variety of tasks in environments that are designed for people. A significant number of the occupations that require hands, also require two-handed manipulation of objects and environments.
What about mobility? Can we get away with tethers for power and network? Can the system be on a wheeled base? The answer to both of these questions is no. Perhaps less obvious than hands, but two-legged (sometimes called bipedal) mobility is required for many different kinds of work. Wheels are fine for certain tasks but limit generality. Tethers significantly reduce what a robot can do.
About 65% of O*NET occupations require mobility, and roughly 20% of them require two legs. This is not nearly as lopsided as was the case with hands. Most of the world’s work can be done by robots with good hands and poor mobility. But robots with poor (or no) hands and good mobility can do very little useful work. Hands are much more important than mobility when it comes to general-purpose work.
Industrial Design

Given these constraints, there is still an enormous design space to work within. We could design dozens of different robots that met all these requirements and looked very different.
Phoenix is the sixth major design we’ve done on the basic humanoid form factor. Of the previous designs, we liked the way the immediately previous one — the fifth generation, which was up until recently, our workhorse — looked the best. We spent a lot of time thinking about why, and came up with the following explanation. While there are many types of reactions people can have to a robot, there were two of them we felt were most important, and they tend to pull in opposite directions. These two are ‘dimensions’ are (a) is the robot endearing, or said a different way, do I like being around the robot, feel a connection to it, and want it to do well and succeed, and (b) does the robot look competent, or does it look like it can do serious work.
In science fiction, robots tend to be one or the other, but rarely both. Go through all the scifi robots you can think of, and observe they tend to fall into one of those two categories (there are some exceptions). This also tends to be true in reality. Few people find industrial manufacturing robots endearing, but they certainly look (and are) competent. The worst case, which unfortunately many humanoid robots, including some of our previous iterations, fall into, is when a robot looks neither endearing nor competent.
In the industrial design of Phoenix, we wanted to maximize these two qualities. But in some sense that type of design is a veneer. Not only does the robot need to look competent, it also has to be competent. It needs to be able to deliver on the promise, and be able to actually do real work. Also, the design needs to be manufacturable with the technologies available to us today. Many science fiction robots, or robots visualized solely using computer graphics (this latter category is unfortunately a big part of the marketing of some other humanoid companies), could not be built in real life, at least with technologies available today.
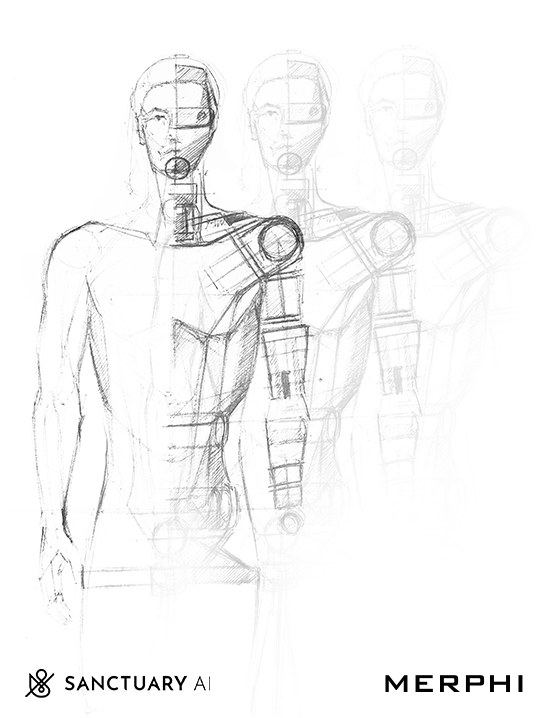
To iterate towards a design that was manufacturable, endearing, looked competent, and delivered on the promise by actually being highly physically capable, we felt that the most important starting points were to get the overall dimensions (such as the height and overall body proportions) and the design of the head correct. We had the advantage that the hands themselves were relatively fixed due to technological constraints, which meant the rest of the system had to conform to the hands.
On the topic of the robots’ dimensions, we built a VR environment where Sanctuary employees could stand in a room with simulated robots of different sizes and shapes and virtually morphed these to find what people liked. This was a fascinating exercise. One thing we found was that on average men felt threatened by robots that were taller than they were, but women did not. It was clear that the overall dimensions, including height, shoulder-to-waist ratios, and limb lengths, were extremely important design choices. We ended up choosing the height and proportions of Phoenix to walk the line between looking competent and ready for work, but not crossing the line to intimidating or threatening.
For the design of Phoenix, we collaborated with Swedish industrial design firm, MERPHI. MERPHI’s co-founder and CTO, Mehrdad H.M. Farimani, felt that to achieve the objective of the design being endearing, the robot’s design should look imperfect, which is a fascinating premise that we initially did not buy into, but over time looks like a very important idea.
Here is Mehrdad on this subject:
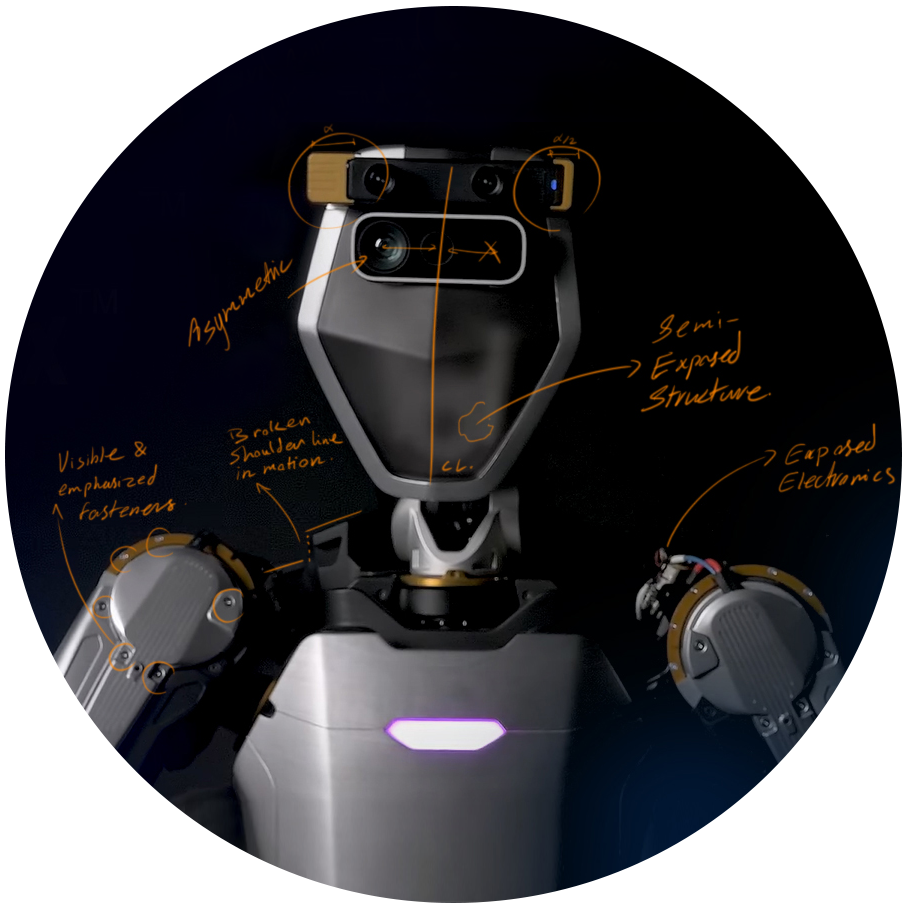
“People are fallible and everybody has flaws. For us to relate to a machine and create a relationship and attachment to it, we also need that thing to have flaws … for design, it is an opportunity to create a relationship with people. Therefore, in the design of Phoenix, we tried to apply ‘intentional imperfection.’ And I believe that is one factor that makes the look of Phoenix attractive to people.”
Getting to a Billion General-Purpose Robots
We see a future where the descendants of Phoenix do much of the world’s work. People will never run out of things that we want done. Having exceptionally skilled, plentiful and inexpensive labor available will mean that the types of things we can accomplish as a civilization will accelerate. From the mundane to the cosmic (think space exploration), being able to print generally intelligent labor transforms civilization in a way that no previous technology has done. The promise here naturally leads to billions of these systems, and a new type of machine that we will always want more of.
Making this future real is not just about how well the technology functions. In order for people to want this future, it is absolutely critical that people feel safe and trust being around our technology.
Farimani describes the challenge of designing robots that people trust and want to work with:
“In the design of a robot, there is a fine line between people liking it and feeling threatened by it… Usually, when I have the first contact with the clients, they talk a lot about how they want their project to end up like an Apple product or a Tesla product, so this is a red flag for me and it is a sign that the client is not visionary enough. But the Sanctuary team had its own unique vision.”
Sanctuary AI is pioneering human-like intelligence in general-purpose robots. This also makes us influential industry trailblazers of humanoid design. We are creating a solution to work that will impact generations to come. Phoenix is so much more than a piece of technology or a product. Our robots and their Carbon-based minds are going to change the world and become ingrained in the infrastructure of society and the economy. The magnitude of this is felt in the design of Phoenix as well. It is being designed to stay relevant through time.
“All in all, I think this is what differentiates Phoenix from other robots. We did not design a fashion that is contextual, but a skin that can adapt to different fashions … Phoenix is designed to be timeless. It does not follow design trends or even retro trends. It has its own unique look, the same as the vision of Sanctuary AI.”
This post was written with interview quotes from Mehrdad H.M Farimani, Co-Founder & CTO of MERPHI Design. The information he provided was on behalf of the entire MERPHI team, who have all directly and indirectly supported the collaborative project. Those team members also include Filip Sperr, Philip Berlin, Amanda Cederhom, Minnie Barnaby, and Melina Kazemi.

Geordie Rose
Co-Founder and CEO
Sanctuary AI
Read more from Geordie Rose
Sanctuary is on a mission to create the world’s first human-like intelligence in general-purpose robots that will help us work more safely, efficiently, and sustainably, helping to address the labor challenges facing many organizations today. Sanctuary's growing list of customers and investors represents a wide variety of industries across Canada, the U.S., and other countries around the world.
Join us and work with world leaders in the fields of artificial intelligence, cognition, and robotics—all working together toward a common goal. Visit our careers page to learn more.